Tasmanian Koala
Intoduction
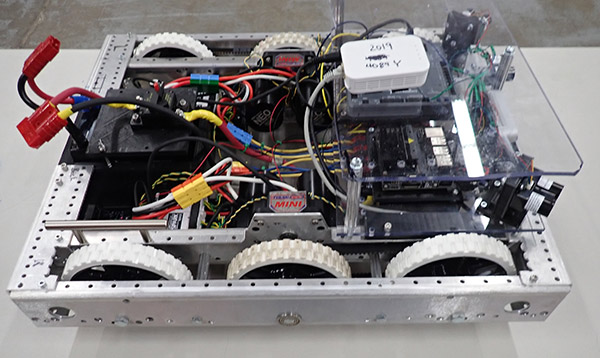
The Tasmanian Koala is a testing platform that was built to be light and easy to transport.
| Mechanical |
| Physical |
| Length: 24 inches |
| Width: 19 inches |
| Height: 10 inches |
| Weight: 48 pounds with battery |
| Drive Base |
| Andymark AM14U3 |
| 6 inch wheels |
| Toughbox Mini 7.31:1 gear ratio |
| 4 REV Neos |
| Electrical |
| Primary |
| 12V SLA Sealed Lead Acid 14AH Deep Cycle |
| 120Amp thermal circuit breaker |
| Secondary |
| CTR POWER DISTRIBUTION PANEL (PDP) |
| Connected to Primary |
| Voltage Regulator Module (VRM) |
| Connected to CTR PDP VRM port |
| Pololu 5V 9A step down converter |
| Connected to CTR PDP Port 6, 20 Amp |
| Loads |
| Rev Spark Max A |
| Connected to CTR PDP Port 15, 40 Amp |
| Rev Spark Max B |
| Connected to CTR PDP Port 14, 40 Amp |
| Rev Spark Max C |
| Connected to CTR PDP Port 13, 40 Amp |
| Rev Spark Max D |
| Connected to CTR PDP Port 15, 40 Amp |
| RoboRio |
| Connected to CTR PDP controller port |
| Open-Mesh OM5P-AC Dual Band 1.17 Gbps Access Point |
| Connected to CTR VRM 12V 2Amp port |
| Linksys 5 port switch |
| Connected to CTR VRM 5V 2Amp port |
| NVIDIA Jetson Nano |
| Connected to Pololu 5V Stepdown |
| CANcoder Encoder A |
| Function: Left Wheel Encoders |
| Connected to CTR PDP Port 5, 20 Amp |
| CANcoder Encoder B |
| Function: Right Wheel Encoders |
| Connected to CTR PDP Port 5, 20 Amp |
| Gadgeteer Pigeon IMU |
| Connected to CTR PDP Port 5, 20 Amp |
| Intel Realsense |
| Connected to NVIDIA Jetson Nano USB port |
| Arduino Every Nano |
| Connected to Roborio, I2C SCL, SDA port, 5V GND port |
| Adafruit 8 neopixel line |
| Connected to Arduino Every Nano pin D20 |
| Eithernet |
| address |
| RoboRio |
| IP address 10.40.89.2 |
| Address Roborio-4089-frc.local |
| Open-Mesh OM5P-AC Dual Band 1.17 Gbps Access Point |
| IP address 10.40.89.1 |
| SID: 4089_Yawl |
| NVIDIA Jetson Nano |
| IP address: |
| Address: |
| CAN Bus |
| Rev Spark Max A |
| Function Neo Brushless Left Motor A |
| CAN bus address 1 |
| Rev Spark Max B |
| Function Neo Brushless Left Motor B |
| CAN bus address 3 |
| Rev Spark Max C |
| Function Neo Brushless Right Motor A |
| CAN bus address 2 |
| Rev Spark Max D |
| Function Neo Brushless Right Motor B |
| CAN bus address 4 |
| RoboRio |
| CAN bus address 0 |
| CTR CANcoder A |
| CAN bus address 11 |
| CTR CANcoder B |
| CAN bus address 12 |
| Gadgeteer Pigeon IMU |
| CAN bus address 10 |
| CTR POWER DISTRIBUTION PANEL |
| CAN bus address 18 |
| I2C |
| Arduino Every Nano |
| Address 8 |
Copyright 2024 by James Wright. All Rights Reserved.