Tyrannosaurus Wombat
Intoduction
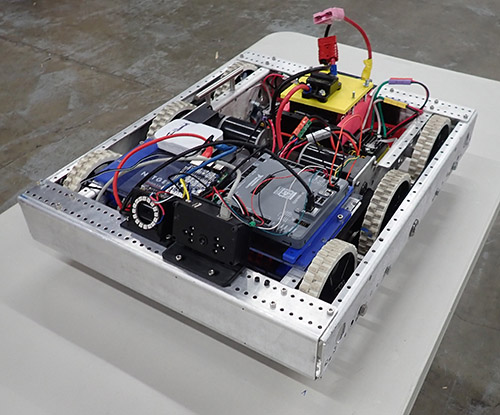
The Tyrannosaurus Wombat is a testing platform that was built to be light and easy to transport.
| Mechanical |
| Physical |
| Length: 24 inches |
| Width: 19 inches |
| Height: 10 inches |
| Weight: 48 pounds with battery |
| Drive Base |
| Andymark AM14U3 |
| 6 inch wheels |
| Toughbox Mini 8.45:1 gear ratio |
| 4 mini CIMs |
| Electrical |
| Primary |
| 12V SLA Sealed Lead Acid 14AH Deep Cycle |
| 120Amp thermal circuit breaker |
| Secondary |
| CTR POWER DISTRIBUTION PANEL (PDP) |
| Connected to Primary |
| Voltage Regulator Module (VRM) |
| Connected to CTR PDP VRM port |
| Pololu 5V 9A step down converter |
| Connected to CTR PDP Port 6, 20 Amp |
| Loads |
| CTR Talon SRX A |
| Connected to CTR PDP Port 15, 40 Amp |
| CTR Talon SRX B |
| Connected to CTR PDP Port 14, 40 Amp |
| CTR Talon SRX C |
| Connected to CTR PDP Port 13, 40 Amp |
| CTR Talon SRX D |
| Connected to CTR PDP Port 15, 40 Amp |
| Lime Light |
| Connected to CTR PDP Port 7, 20 Amp |
| RoboRio |
| Connected to CTR PDP controller port |
| Open-Mesh OM5P-AC Dual Band 1.17 Gbps Access Point |
| Connected to CTR VRM 12V 2Amp port |
| Linksys 5 port switch |
| Connected to CTR VRM 12V 2Amp port |
| Raspberry Pi 4 |
| Connected to Pololu 5V Stepdown |
| Pololu A-Star 32U4 Robot Controller LV |
| Connected to Pololu 5V Stepdown |
| Connected to Raspberry Pi expansion port. |
| SRX Mag Encoder A |
| Function: Left Wheel Encoders |
| Connected to CTR Talon SRX A |
| SRX Mag Encoder B |
| Function: Right Wheel Encoders |
| Connected to CTR Talon SRX C |
| Gadgeteer Pigeon IMU |
| Connected to CTR Talon SRX D |
| Microsoft LifeCam HD-3000 for Business |
| Connected to Raspberry Pi 4 USB port |
| Arduino Every Nano |
| Connected to Roborio, I2C SCL, SDA port, 5V GND port |
| Adafruit 16 neopixel ring |
| Connected to Arduino Every Nano pin D20 |
| Eithernet |
| Lime Light |
| IP address 10.44.44.11 |
| address |
| RoboRio |
| IP address 10.44.44.2 |
| Address Roborio-4444-frc.local |
| Open-Mesh OM5P-AC Dual Band 1.17 Gbps Access Point |
| IP address 10.44.44.1 |
| SID: 4444_jims |
| Raspberry Pi 4 |
| IP address: |
| Address: |
| CAN Bus |
| CTR Talon SRX A |
| Function Mini CIM Left Motor A |
| CAN bus address 1 |
| CTR Talon SRX B |
| Function Mini CIM Left Motor B |
| CAN bus address 3 |
| CTR Talon SRX C |
| Function Mini CIM Right Motor A |
| CAN bus address 2 |
| CTR Talon SRX D |
| Function Mini CIM Right Motor B |
| CAN bus address 4 |
| RoboRio |
| CAN bus address 0 |
| CTR POWER DISTRIBUTION PANEL |
| CAN bus address 18 |
| I2C |
| Arduino Every Nano |
| Address 8 |
Characterization
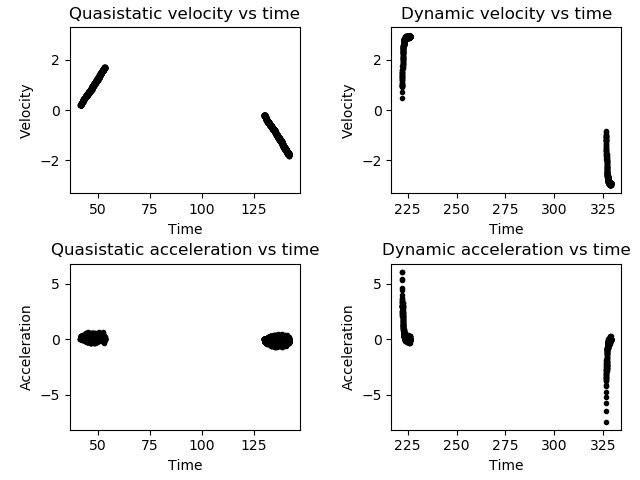
I've run the frc-characterization tool twice, once at 0.25V/s and once at 0.5V/s. Here are the results:
0.25V/s
kS:0.632, kV:1.85, kA:0.628, r-squared:0.998, kP:41.5, kD:20.2
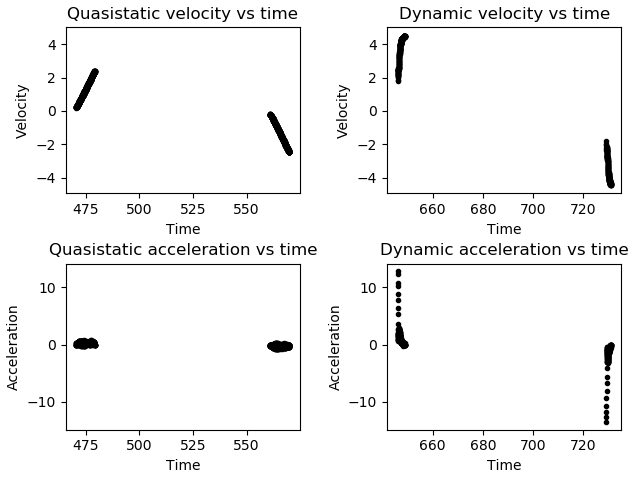
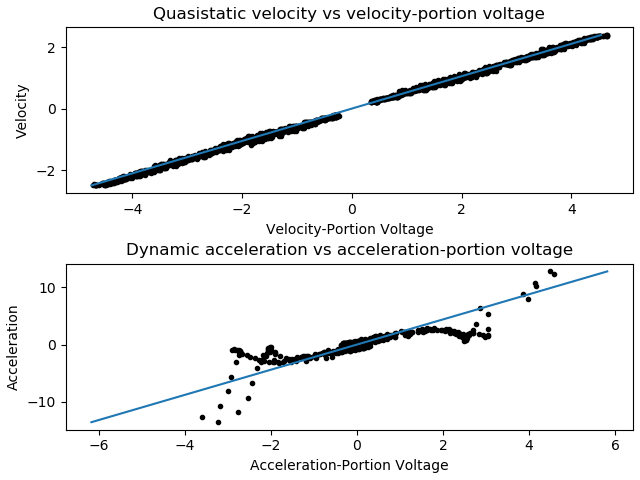
0.5V/s
kS:0.66, kV:1.9, kA:0.4555, r-squared:0.994, kP:35.2, kD:16.6

Copyright 2024 by James Wright. All Rights Reserved.